ADO-GS
This project is forked from QGroundStation which is a QT-based ground station software designed to control vehicles such as drones, submarines. It works with ADO-Web. Some of the added features are shown in the following screenshots.
Screenshots
Only users that has Pilot role on ADO-Web can login to the application.
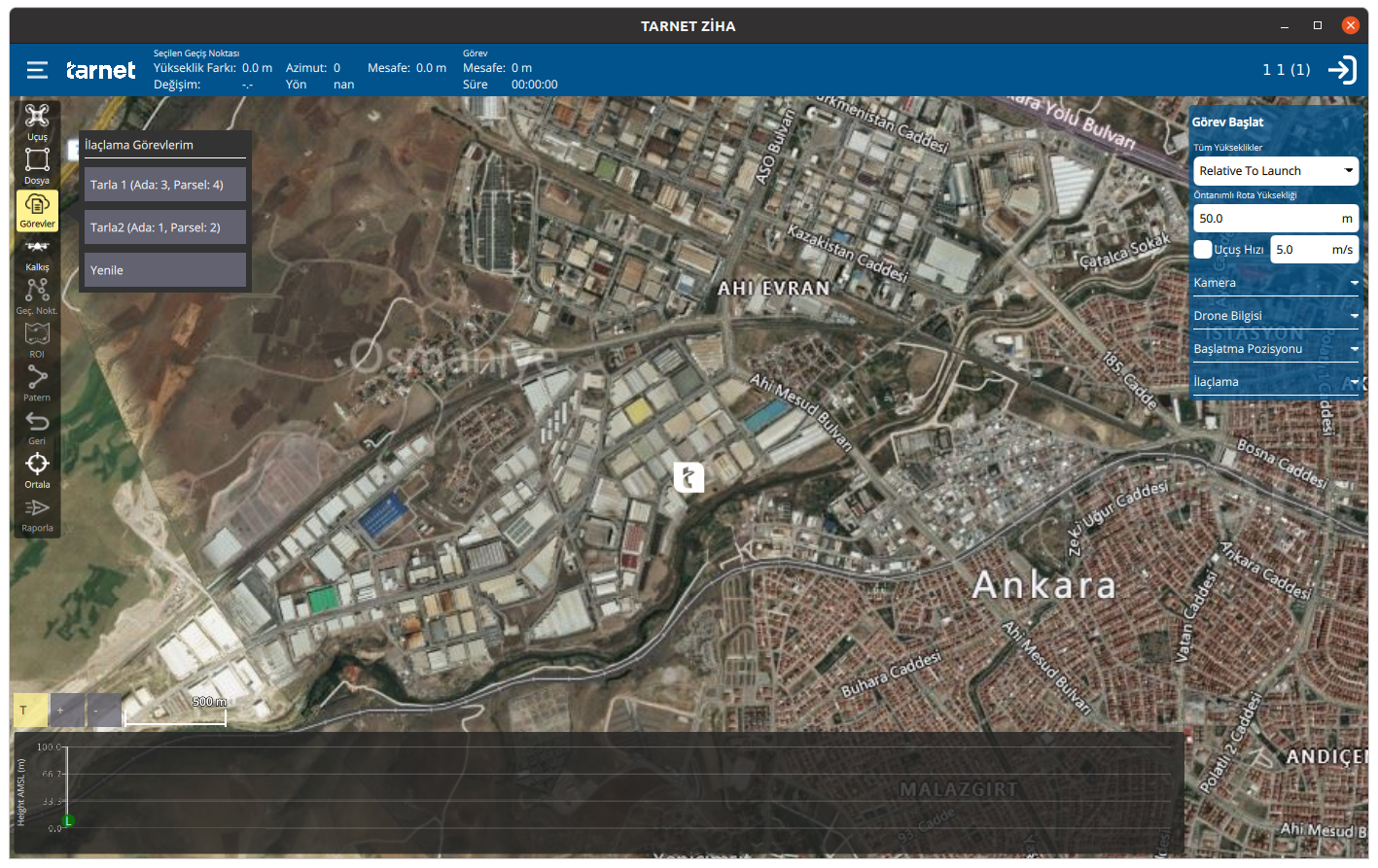
Spraying tasks that are assigned to the logged-in pilot can be listed.
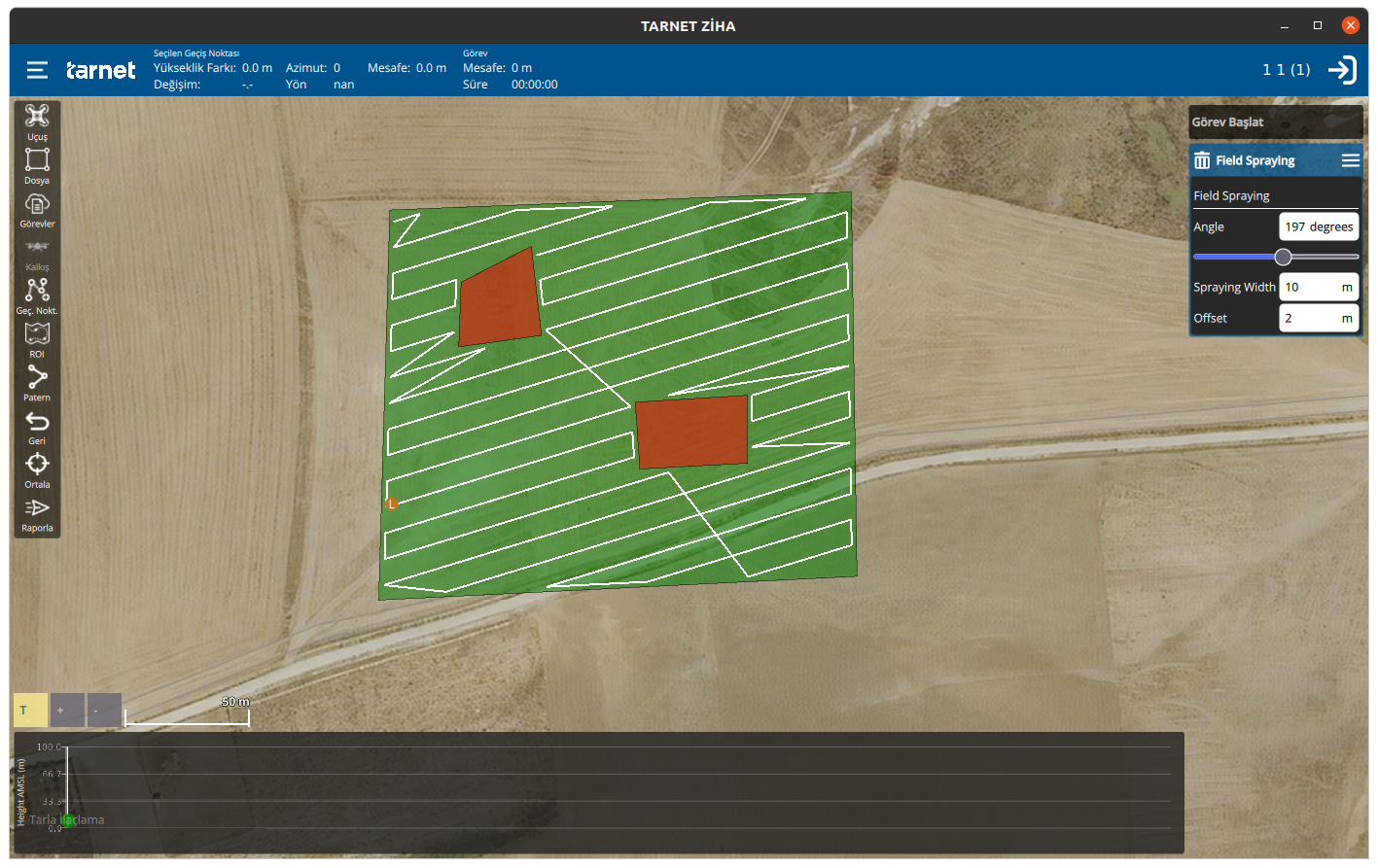
The field and obstacle borders marked in ADO-Web are loaded. The original route planner of QGroundStation did not support obstacle exclusion. This feature is added afterwards.
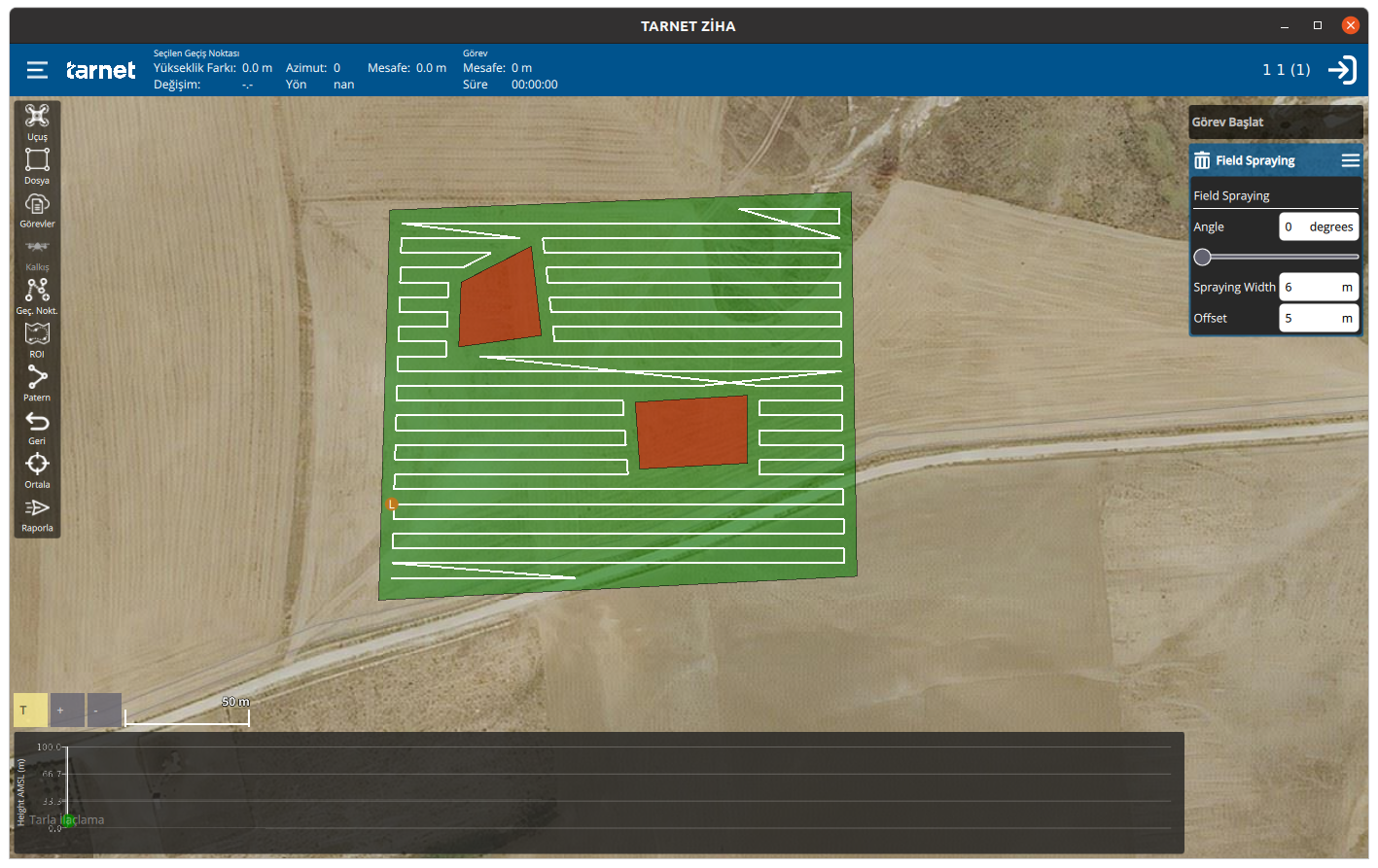
Route parameters like angle, width and offset can be changed by the pilot.